arduino-scratch
24 - Els servomotors
Finalitat
Conèixer els servomotors o servos. Veure en què es diferencien d’un motor normal. Aprendre a manejar-los amb un potenciòmetre i amb un joystick.
Material
| Imatge | Descripció |
|---|---|
 |
Arduino Uno o compatible amb S4A i amb el firmware per S4A carregat. |
 |
Una protoboard |
 |
Cables de connexió |
 |
Un joystick |
 |
Un potenciòmetre de 10k Ohms |
 |
Un servo amb els seus horns |
Què és un servomotor
Els motors de corrent continu que hem manejat fins ara giren contínuament a una velocitat determinada, que depén d’un senyal de control.
Un servomotor, o simplement servo, no gira de manera contínua, sinó que el que fem és controlar la seua posició.
Amb aquesta capacitat de moure’s un angle concret i mantindre’s ací podem crear tota classe de moviments d’una forma controlada; per exemple en braços robòtics, cotxes de radiocontrol o timons de vaixells i avions.
Normalment l’angle de gir d’un servo no és de 360°, sinó de 180° (encara que també n’hi ha) i són de corrent continu.
Tenen 3 fils de connexió, 5V (roig), GND (negre o marró) i Control (groc o blanc). El senyal de control li la donarem connectant-ho a una de les eixides analògiques de la nostra placa Arduino.
Servo i potenciòmetre
En aquest apartat controlarem el moviment del servo utilitzant un potenciòmetre, de la mateixa forma que l’hem utilitzat en altres lliçons.
Normalment el servo ve amb diferents hèlices que podem acoblar-li en funció de l’objecte amb el qual vaja a interactuar o del que vulguem aconseguir. El primer que hem de fer és caragolar qualsevol de les hèlices que tinguem en l’eix de gir per a poder observar bé el gir.
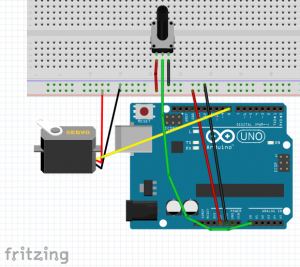
S4A té tres pins reservats per a ajudar-nos a manejar servos. Són els pins 4, 7 i 8. Tenint això en compte, l’esquema elèctric
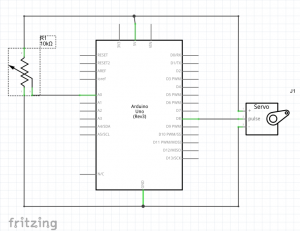
i el muntatge en la Protoboard són molt senzills:
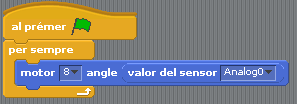
Per a controlar aqueixos pins especials usarem un nou tipus de blocs de la categoria “Moviment” anomenats “motor … angle …“. Aquest bloc posiciona el servo en l’angle que li indiquem. Podeu provar-ho de manera molt senzilla amb aquest xicotet programa:

- Si variem l’angle veurem com el servo es mou fins a aconseguir la nova posició (recordeu que el valor ha d’estar entre 0 i 180°).
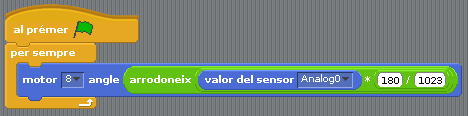
Com el que volem en què l’angle varie en funció de la posició del potenciòmetre hem de modificar una mica el programa:
Ací tindrem el mateix problema que ja ens ha sorgit més vegades. Com l’entrada analògica té un rang de 0 a 1023 i l’angle de 0 a 180°, la majoria del moviment del potenciòmetre no tindrà cap efecte.
Per a aprofitar tot el gir del potenciòmetre adaptarem els valors de l’entrada analògica als graus que pot girar el servo de la següent forma:
\[Angle = \frac{180}{1023} \times ValorEntradaAnalògica\]D’aquesta forma quan en l’entrada connectada al potenciòmetre tinguem 0 l’angle serà 0° i quan estiga en el màxim 1023 serà 180°, i podrem aprofitar tot el rang de moviment del potenciòmetre.
Servo i joystick
El que farem amb el joystick és sumar o restar graus a l’angle de la posició del servo en comptes de calcular directament l’angle. En cristià, en moure el joystick el servo girarà en l’una o l’altra direcció i mantindrà aqueixa posició quan el soltem.
L’esquema elèctric i el muntatge en la Protoboard són molt senzills, simplement canviarem el potenciòmetre pel joystick (ja hem vist com connectar-lo en les lliçons 19 i 20). Jo utilitzaré l’eix X del joystick.
El primer que farem és crear una variable “angle” i fixar la posició inicial del servo a, per exemple, 90°.
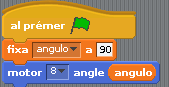
De la mateixa forma que vam fer en la lliçó 19, crearem dues estructures condicionals per a saber si el joystick s’ha mogut cap a un costat o cap a l’altre, i sumarem o restarem a l’angle anterior un nombre de graus (major com més ràpid vulguem que es moga).

Si voleu continuar jugant amb el servo, podeu tractar de fer que el moviment del joystick siga analògic com hem fet en les lliçons anteriors, o que en pitjar el botó del joystick el servo es moga a una posició determinada.
Conceptes importants
- Hem aprés què són i com funcionen els servos.
- Sabem controlar-los amb un potenciòmetre o un joystick, i podrem usar l’un o l’altre en funció del que necessitem per als nostres projectes.
- Hem adaptat una entrada analògica per a transformar-la en una eixida valor que vaja de 0 a 180º.