arduino-tutorial
31 - Mòdul codificador rotatori
Descripció general
El codificador rotatori és un dispositiu d’entrada rotatori que proporciona una indicació de quant s’ha girat la perilla i en quina direcció està girant.
És un gran dispositiu per al control de motors pas a pas i servo. També pot usar-ho per a controlar dispositius com a potenciòmetres digitals.
Material
| Imatge | Descripció |
|---|---|
 |
Arduino Uno o equivalent. |
 |
Cables de connexió |
 |
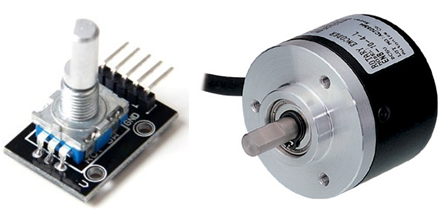
Mòdul codificador rotatori KY040 |
Especificacions
- Voltatge de funcionament: 5V
- Angle mecànic: 360 graus
- Eixida: codi gris de 2 bits
- Posicions per revolució: 30
Funcionament
Mesurament de posició rotatòria
Un codificador rotatori o de “eix” és un dispositiu de mesurament angular. S’utilitza per a mesurar amb precisió la rotació dels motors o per a crear controladors de roda que poden girar infinitament (sense topall final com ho té un potenciòmetre). Alguns d’ells també estan equipats amb un botó polsador quan pressiones l’eix (com els que s’usen per a la navegació en molts controladors de música). Venen en tota mena de resolucions, des de potser 16 fins almenys 1024 passos per revolució. Els codificadors industrials venen de 1200PPR a 10000PPR (Pols per revolució).
Principi de mesurament
Els codificadors rotatoris tenen dues o tres eixides A, B i Z. A i B s’utilitzen per a determinar la direcció de rotació, i comptar el nombre de polsos donarà la posició de rotació. Z està disponible en codificadors de grau industrial. És pols de posició zero. Només dona un pols en una revolució.
Conceptes bàsics del codificador rotatori
Un codificador rotatori té un nombre fix de posicions per revolució (PPR). El mòdul Keyes KY-040 té trenta d’aquestes posicions.
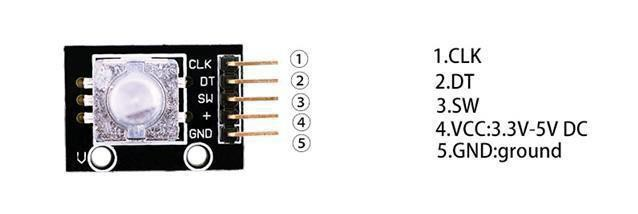
En un costat de l’interruptor hi ha tres pins. En el cas del KY-040, estan orientats com es mostra.
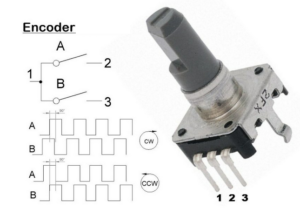
Dins del codificador hi ha dos interruptors. Un interruptor connecta el pin 1 al pin 2, i l’altre interruptor connecta el pin 1 al 3.
En cada posició del codificador, tots dos interruptors estan oberts o tancats. Cada moviment angular fa que aquests interruptors canvien d’estat de la següent manera:
- Si tots dos interruptors estan tancats, girar el codificador en sentit horari o antihorari una posició farà que tots dos interruptors s’òbriguen
- Si tots dos interruptors estan oberts, girar el codificador en sentit horari o antihorari una posició farà que tots dos interruptors es tanquen.
La següent il·lustració és representativa de com es construeix l’interruptor.
La mesura del angle de rotació es calcula amb la següent formula:
\[Angle = \left(\frac{360}{ppr}\right)·polsos\]L’eixida A està connectada a la interrupció (ASCENS) i quan ocorre la interrupció, depenent de l’estat de l’eixida B, el comptatge de polsos s’incrementa o disminueix.
Com podem veure, la posició angular de la terminal A i la terminal B és tal que:
- Girar l’interruptor en el sentit de les agulles del rellotge farà que l’interruptor que connecta A i C canvie primer d’estat.
- Girar l’interruptor en sentit contrari a les agulles del rellotge farà que l’interruptor que connecta B i C canvie primer d’estat.
Si haguérem de representar l’obertura i el tancament dels interruptors com a formes d’ona, es veuria així:
Hi ha molts codificadors disponibles en el mercat, tots tenen el principi bàsic d’eixida A,B, com es mostra en la figura. Alguns dels codificadors tenen GND, +V, SW, DT, CLK. La configuració de pins d’aquests codificadors és:
- CLK = A
- DT = B
- SW = interruptor de pressió
- VCC = (+) 5V
- GND = (-)
El mòdul està dissenyat perquè l’eixida siga baixa quan els interruptors estan tancats i alta quan els interruptors estan oberts.
El nivell baix es genera col·locant una connexió a terra en el pin C i passant-la als pins CLK i DT quan els interruptors estan tancats.
El nivell alt es genera amb una entrada de subministrament de 5 V i resistències pull-up, de manera que CLK i DT estan alts quan els interruptors estan oberts.
No es va esmentar anteriorment l’existència d’un interruptor de botó que és part integral del codificador. Si espenta l’eix, un interruptor normalment obert es tancarà. La funció és útil si desitja canviar la funció de l’interruptor. Per exemple, és possible que desitge tindre la capacitat de realitzar ajustos gruixuts i fins.
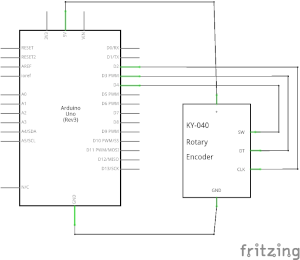
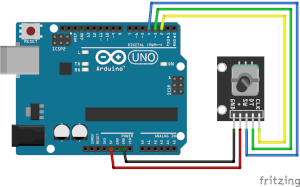
Connexió
Programació
Codi: ARD031
/*
* Projecte nº: ARD031
* Data: 29/01/2022
* Descripcio: Prova del modul encoder KY040
* Nota:
*
*/
//Define the pin connection
int CLK = 2;//CLK->D2
int DT = 3;//DT->D3
int SW = 4;//SW->D4
const int interrupt0 = 0;
int count = 0;//Define the count
int lastCLK = 0;//CLK initial value
void setup()
{
pinMode(SW, INPUT);
digitalWrite(SW, HIGH);
pinMode(CLK, INPUT);
pinMode(DT, INPUT);
attachInterrupt(interrupt0, ClockChanged, CHANGE);//Set the interrupt 0 handler, trigger level change
Serial.begin(9600);
}
void loop()
{
if (!digitalRead(SW) && count != 0) //Read the button press and the count value to 0 when the counter reset
{
count = 0;
Serial.print("count:");
Serial.println(count);
}
}
//The interrupt handlers
void ClockChanged()
{
int clkValue = digitalRead(CLK);//Read the CLK pin level
int dtValue = digitalRead(DT);//Read the DT pin level
if (lastCLK != clkValue)
{
lastCLK = clkValue;
count += (clkValue != dtValue ? 1 : -1);//CLK and inconsistent DT, +1, otherwise -1
Serial.print("count:");
Serial.println(count);
}
}