arduino-tutorial
33 - Mòdul sensor ultrasònic
Descripció general
El sensor ultrasònic és excel·lent per a tota mena de projectes que necessiten mesuraments de distància, evitar obstacles per exemple.
L’HC-SR04 és econòmic i fàcil d’usar, ja que disposem d’una biblioteca dissenyada específicament per a aquests sensors.
Material
| Imatge | Descripció |
|---|---|
 |
Arduino Uno o equivalent. |
 |
Cables de connexió |
 |
Mòdul ultrasònic HC-SR04 |
Introducció de components
Sensor ultrasònic
Els sensors ultrasònics funcionen emetent ones de so amb una freqüència que és massa alta perquè un humà les escolte. Aquestes ones sonores viatgen per l’aire a la velocitat del so, aproximadament 343 m/s. Si hi ha un objecte enfront del sensor, les ones sonores es reflecteixen i el receptor del sensor ultrasònic les detecta. En mesurar quant temps va passar entre l’enviament i la recepció de les ones de so, es pot calcular la distància entre el sensor i l’objecte.
A 20 °C, la velocitat del so és d’aproximadament 343 m/s o 0,034 cm/µs. Diguem que el temps entre l’enviament i la recepció de les ones sonores és de 2000 µs (microsegons). Si multipliques la velocitat del so pel temps que van recórrer les ones sonores, obtens la distància que van recórrer les ones sonores.
\[Distància = Velocitat · Temps\]Però aqueix no és el resultat que busquem. La distància entre el sensor i l’objecte és en realitat només la meitat d’aquesta distància perquè les ones sonores van viatjar del sensor a l’objecte i de tornada de l’objecte al sensor. Llavors necessites dividir el resultat per dos.
\[Distància (cm) = \frac{V_{so}(cm/\mu s) · T (\mu s)}{2}\]I així, per a l’exemple, això es converteix en:
\[Distància (cm) = \frac{0,0343(cm/\mu s) · 2000 (\mu s)}{2} = 34,3 cm\]Dependència de la velocitat del so amb la temperatura
La velocitat del so en realitat depén en gran manera de la temperatura i en un grau molt de menor de la humitat de l’aire. Wikipedia afirma que la velocitat del so augmenta aproximadament 0,6 m/s per grau Celsius. Per a la majoria dels casos a 20 °C, pot usar 343 m/s, però si desitja obtindre lectures més precises, pot calcular la velocitat del so amb la següent fórmula:
\[V_{so} (m/s) = 331,3 + (0,606 · T (ºC))\]- V = Velocitat del so (m/s)
- T = Temperatura de l’aire (°C)
Aquesta fórmula no inclou la humitat ja que el seu efecte sobre la velocitat del so és molt xicotet.
Podem usar un sensor de temperatura i humitat DHT11 per a calibrar la velocitat del so i obtindre una lectura de distància més precisa amb l’HC-SR04.
Com funciona l’HC-SR04
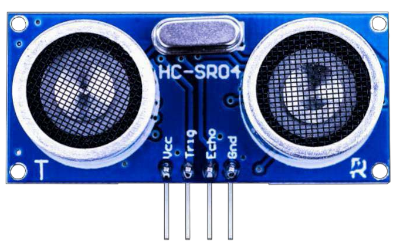
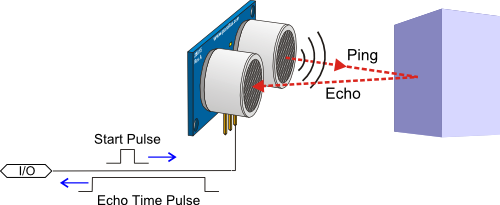
En la part frontal del sensor HC-SR04, pot trobar dos cilindres platejats (transductors ultrasònics), un és el transmissor de les ones de so i l’altre és el receptor. Per a permetre que el sensor genere una explosió sònica, ha de configurar el pin Trig alt durant almenys 10 µs. Després, el sensor crea una ràfega d’ultrasò de 8 cicles a 40 kHz.
Aquest esclat sònic viatja a la velocitat del so, rebota i és rebut pel receptor del sensor. El pin Echo després emet el temps que les ones de so van viatjar en microsegons.
Pot usar la funció pulseIn() en el codi Arduino per a llegir la longitud del pols del pin Echo. Després d’això, pot usar la fórmula esmentada anteriorment per a calcular la distància entre el sensor i l’objecte.
Especificacions
- Voltatge de funcionament: 5 V
- Corrent de funcionament: 15 dt.
- Freqüència: 40kHz
- Rang de mesurament: 2 – 400 cm
- Resolució: 3mm
- Angle de mesurament: 15 graus
- Senyal d’entrada de tret (trigger): 10 µs de pols alt
Connexions
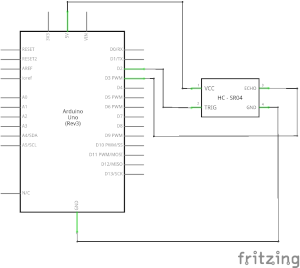
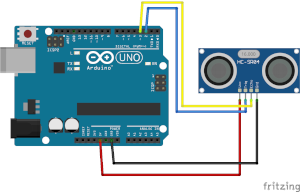
| HC-SR04 | Arduino |
|---|---|
| VCC | 5 V |
| Trig | Pin 2 |
| Echo | Pin 31 |
| GND | GND |
Programació
El següent codi prova el funcionament del sensor fent ús de la biblioteca «NewPing».
/*
* Projecte nº: ARD033
* Data: 01/02/2022
* Descripcio: Prova del HC-SR04 amb bibliteca
* Nota:
*
*/
#include <NewPing.h>
#define TRIGGER_PIN 2
#define ECHO_PIN 3
#define MAX_DISTANCE 200
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
void setup()
{
Serial.begin(9600);
}
void loop()
{
delay(500);
unsigned int uS = sonar.ping();
Serial.print(\"Ping: \");
Serial.print(uS / US_ROUNDTRIP_CM);
Serial.println(\"cm\");
}
Aquest codi no utilitza cap biblioteca.
/*
* Projecte nº: ARD033b
* Data: 01/02/2022
* Descripcio: Prova de HC-SR04 sense biblioteca
* Nota:
*
*/
// Defineix pins Trig and Echo
#define trigPin 2
#define echoPin 3
// Defineix variables
long duration;
int distance;
void setup()
{
// Defineix entrades i eixides
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
//Inicia comunicació serie a 9600 bps
Serial.begin(9600);
}
void loop()
{
// Llimpia trigPin ficant l'eixida a LOW
digitalWrite(trigPin, LOW);
delayMicroseconds(5);
// Dispara el sensor establint trigPin a HIGH per 10 microsegons:
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Llig echoPin, pulseIn() torna la duració en microsegons:
duration = pulseIn(echoPin, HIGH);
// Calcula la distancia
distance = duration \* 0.034 / 2;
// Imprimeix la distancia en el monitor serie
Serial.print(\"Distance = \");
Serial.print(distance);
Serial.println(\" cm\");
delay(50);
}