arduino-tutorial
34 – Mòdul GY-521
Descripció general
En aquesta lliçó, aprendrem a usar el mòdul GY-521 (MPU-6050), que és un dels millors sensors de mesurament d’inèrcia IMU (Inertia Measurement Unit), compatible amb Arduino.
Els sensors IMU com el GY-521 (MPU-6050) s’utilitzen en robots auto-equilibrats, vehicles aeris no tripulats, telèfons intel·ligents, etc.
Material
| Imatge | Descripció |
|---|---|
 |
Arduino Uno o equivalent. |
 |
Cables de connexió |
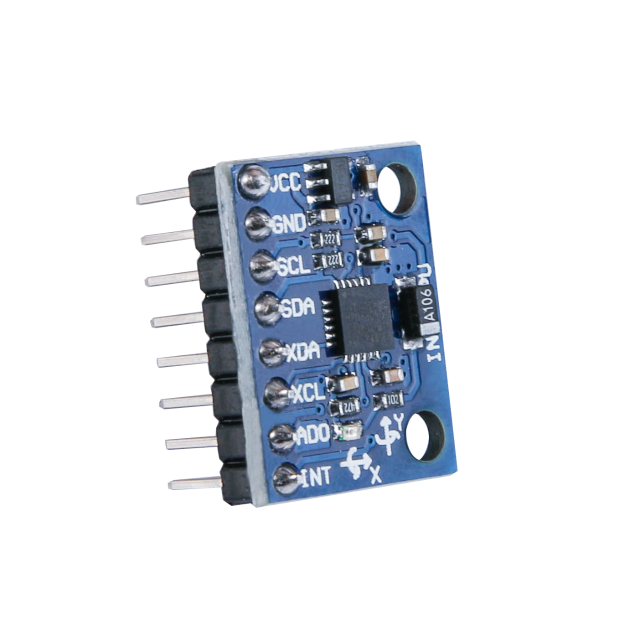 |
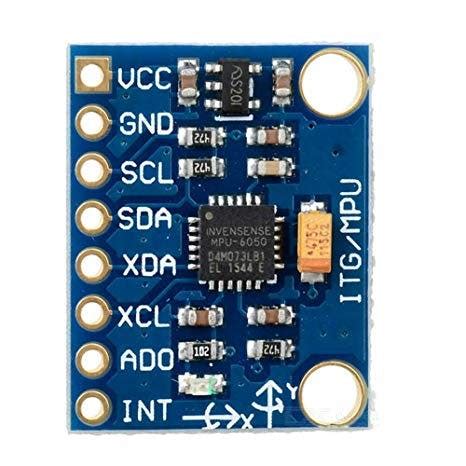
Mòdul GY-521 |
Introducció de components
Sensor GY-521
El sensor InvenSense GY-521 conté un acceleròmetre MEMS i un giroscopi MEMS en un sol xip (MEMS = MicroElectroMechanic System). És molt precís, ja que conté maquinari de conversió d’analògic a digital de 16 bits per a cada canal. Per tant, captura el canal x, y i z al mateix temps. El sensor utilitza el bus I2C per a interactuar amb l’Arduino.
El GY-521 no és car, especialment atés que combina un acceleròmetre i un giroscopi.
Els sensors IMU són un dels tipus de sensors més inevitables que s’utilitzen hui dia en tota mena de dispositius electrònics.
Es veuen en telèfons intel·ligents, dispositius portàtils, controladors de jocs, etc. Els sensors IMU ens ajuden a obtindre la posició d’un objecte adjunt al sensor en un espai tridimensional. Aquests valors solen estar en angles, la qual cosa ens ajuda a determinar la seua posició. Per tant, s’utilitzen en telèfons intel·ligents per a detectar la seua orientació. I també, en dispositius portàtils com la «fit band», que usen sensors IMU per a rastrejar el moviment.
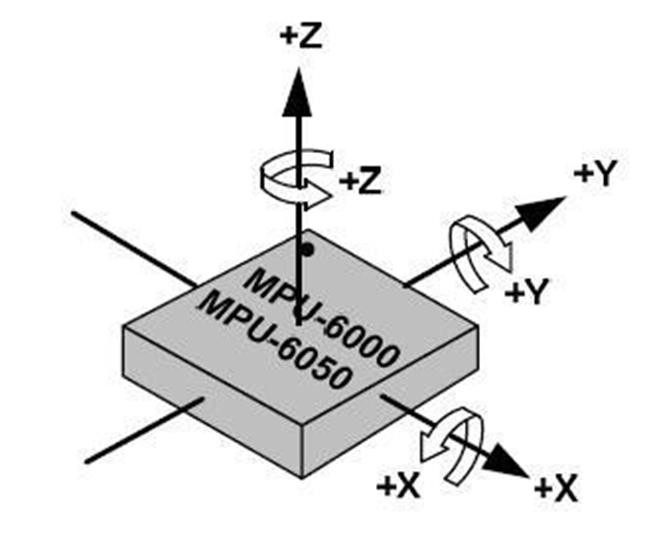
Com funciona?
Els sensors IMU generalment consten de dos o més parts. Enumerant-los per prioritat, són: acceleròmetre, giroscopi, magnetòmetre i altímetre. El GY-521 és un sensor IMU de 6 graus de llibertat (DOF = Degrees Of Freedom) o de sis eixos, cosa que significa que dona sis valors com a eixida. Tres valors de l’acceleròmetre i tres del giroscopi. El GY-521 és un sensor basat en tecnologia MEMS (Micro Electro Mechanical Systems). Tant l’acceleròmetre com el giroscopi estan integrats dins d’un sol xip. Aquest xip utilitza el protocol I2C (Inter Integrated Circuit) per a la comunicació.
Com funciona un acceleròmetre?
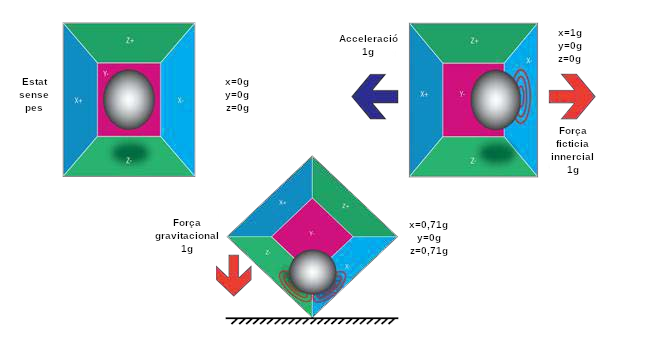
Un acceleròmetre funciona segons el principi de l’efecte piezoelèctric. Ací, imagina una caixa amb forma de cub, amb una xicoteta bola dins, com en la imatge de dalt. Les parets d’aquesta caixa estan fetes amb cristalls piezoelèctrics.
Cada vegada que inclines la caixa, la bola es veu obligada a moure’s en la direcció de la inclinació, a causa de la gravetat.
La paret amb la qual xoca la bola crea xicotets corrents piezoelèctrics. Hi ha en total, tres parells de parets oposades en un paral·lelepípede. Cada parell correspon a un eix en l’espai 3D: eixos X, Y i Z. Depenent del corrent produït per les parets piezoelèctriques, podem determinar l’adreça d’inclinació i la seua magnitud.
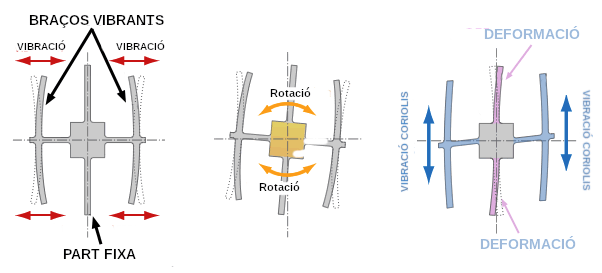
Com funciona un giroscopi?
Els giroscopis funcionen segons el principi de l’acceleració de Coriolis. Imagine que hi ha una estructura similar a una forqueta, que està en constant moviment cap avant i cap endarrere. Es manté en el seu lloc mitjançant cristalls piezoelèctrics. Cada vegada que intenta inclinar aquest arranjament, els cristalls experimenten una força en la direcció de la inclinació. Això es produeix com a resultat de la inèrcia de la forqueta en moviment.
Els cristalls produeixen així un corrent en consens amb l’efecte piezoelèctric, i aquest corrent s’amplifica. Després, els valors són refinats pel microcontrolador.
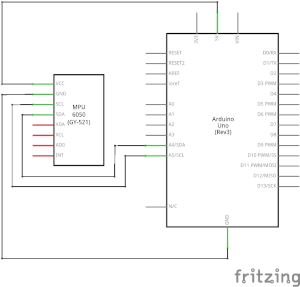
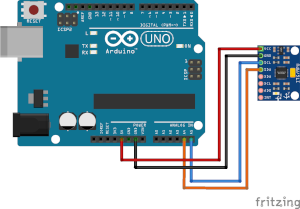
Connexió
Programació
Els exemples següents són traducció del article de Luis Llamas (https://www.luisllamas.es/arduino-orientacion-imu-mpu-6050/).
Per a realitzar la lectura del MPU-6050 usarem la llibreria desenvolupada per Jeff Rowberg disponible en aquest enllaç. També emprarem la llibreria I2Cdev desenvolupada pel mateix autor, que millora la comunicació I2C.
La llibreria proporciona exemples de codi, que resulta aconsellable revisar. Els següents exemples són modificacions a partir dels disponibles en la llibreria.
Llegir valors RAW
En el primer exemple, aprenem a llegir els valors directament proporcionats pel MPU-6050 (valors RAW) a través del bus I2C. Els valors RAW tenen un rang de mesurament entre -32768 i +32767.
/*
* Projecte nº: ARD034a
* Data: 03/02/2022
* Descripcio: Llegir valors RAW
* Nota: traduït de Luis Llamas
*
*/
//GND - GND
//VCC - VCC
//SDA - Pin A4
//SCL - Pin A5
#include "I2Cdev.h"
#include "MPU6050.h"
#include "Wire.h"
const int mpuAddress = 0x68; //Pot ser 0x68 o 0x69
MPU6050 mpu(mpuAddress);
int ax, ay, az;
int gx, gy, gz;
void printTab()
{
Serial.print(F("t"));
}
void printRAW()
{
Serial.print(F("a[x y z] g[x y z]:t"));
Serial.print(ax); printTab();
Serial.print(ay); printTab();
Serial.print(az); printTab();
Serial.print(gx); printTab();
Serial.print(gy); printTab();
Serial.println(gz);
}
void setup()
{
Serial.begin(9600);
Wire.begin();
mpu.initialize();
Serial.println(mpu.testConnection() ? F("IMU iniciat correctament") : F("Error al iniciar IMU"));
}
void loop()
{
// Llegir les acceleracions i velocitats angulars
mpu.getAcceleration(&ax, &ay, &az);
mpu.getRotation(&gx, &gy, &gz);
printRAW();
delay(100);
}
Llegir valors en Sistema Internacional
En el següent exemple apliquem una escala als valors RAW per a obtindre mesuraments amb significat físic. En l’exemple, emprarem valores G per a l’acceleració, i º/s per a la velocitat angular. Amb facilitat podreu modificar el codi perquè proporcione els valors en unitats del Sistema Internacional. L’escalat dependrà del rang de mesurament que seleccionem en el MPU-6050, que recordem pot ser 2g/4g/8g/16g per a l’acceleròmetre i 250/500/1000/2000 (°/s) per al giroscopi.
/*
* Projecte nº: ARD034b
* Data: 03/02/2022
* Descripcio: Llegir valors en SI
* Nota:
*
*/
//GND - GND
//VCC - VCC
//SDA - Pin A4
//SCL - Pin A5
#include "I2Cdev.h"
#include "MPU6050.h"
#include "Wire.h"
const int mpuAddress = 0x68; // Pot ser 0x68 o 0x69
MPU6050 mpu(mpuAddress);
int ax, ay, az;
int gx, gy, gz;
// Factors de conversio
const float accScale = 2.0 * 9.81 / 32768.0;
const float gyroScale = 250.0 / 32768.0;
void printTab()
{
Serial.print(F("t"));
}
// Mostrar mesures en Sistema Internacional
void printRAW()
{
Serial.print(F("a[x y z](m/s2) g[x y z](deg/s):t"));
Serial.print(ax * accScale); printTab();
Serial.print(ay * accScale); printTab();
Serial.print(az * accScale); printTab();
Serial.print(gx * gyroScale); printTab();
Serial.print(gy * gyroScale); printTab();
Serial.println(gz * gyroScale);
}
void setup()
{
Serial.begin(9600);
Wire.begin();
mpu.initialize();
Serial.println(mpu.testConnection() ? F("IMU iniciado correctamente") : F("Error al iniciar IMU"));
}
void loop()
{
// Llegir les acceleracions i velocitats angulars
mpu.getAcceleration(&ax, &ay, &az);
mpu.getRotation(&gx, &gy, &gz);
printRAW();
delay(100);
}
Llegir inclinació amb acceleròmetre
En el següent exemple, calculem la inclinació del MPU-6050 mitjançant la projecció del mesurament de la gravetat i les relacions trigonomètriques que podem veure en l’entrada Cómo usar un acelerómetro con Arduino.
/*
* Projecte nº: ARD034c
* Data: 03/02/2022
* Descripcio: Llegir inclinacio amb accelerometre
* Nota:
*
*/
//GND - GND
//VCC - VCC
//SDA - Pin A4
//SCL - Pin A5
#include "I2Cdev.h"
#include "MPU6050.h"
#include "Wire.h"
const int mpuAddress = 0x68; // Pot ser 0x68 o 0x69
MPU6050 mpu(mpuAddress);
int ax, ay, az;
int gx, gy, gz;
void setup()
{
Serial.begin(9600);
Wire.begin();
mpu.initialize();
Serial.println(mpu.testConnection() ? F("IMU iniciat correctament") : F("Error al iniciar IMU"));
}
void loop()
{
// Llegir les acceleracions
mpu.getAcceleration(&ax, &ay, &az);
//Calcular els angles d'inclinacio
float accel_ang_x = atan(ax / sqrt(pow(ay, 2) + pow(az, 2)))*(180.0 / 3.14);
float accel_ang_y = atan(ay / sqrt(pow(ax, 2) + pow(az, 2)))*(180.0 / 3.14);
// Mostrar resultats
Serial.print(F("Inclinacion en X: "));
Serial.print(accel_ang_x);
Serial.print(F("Inclinacion en Y:"));
Serial.println(accel_ang_y);
delay(10);
}
Obtindre orientació amb giroscopi
En el següent exemple, realitzem la integració del senyal de la velocitat del giroscopi per a obtindre l’orientació del MPU-6050, com podem veure en l’entrada Cómo usar un giroscopio con Arduino.
/*
* Projecte nº: ARD034d
* Data: 03/02/2022
* Descripcio: Obtindre orientació amb giroscopi
* Nota:
*
*/
//GND - GND
//VCC - VCC
//SDA - Pin A4
//SCL - Pin A5
#include "I2Cdev.h"
#include "MPU6050.h"
#include "Wire.h"
const int mpuAddress = 0x68; // Pot ser 0x68 o 0x69
MPU6050 mpu(mpuAddress);
int ax, ay, az;
int gx, gy, gz;
long tiempo_prev, dt;
float girosc_ang_x, girosc_ang_y;
float girosc_ang_x_prev, girosc_ang_y_prev;
void updateGiro()
{
dt = millis() - tiempo_prev;
tiempo_prev = millis();
girosc_ang_x = (gx / 131)*dt / 1000.0 + girosc_ang_x_prev;
girosc_ang_y = (gy / 131)*dt / 1000.0 + girosc_ang_y_prev;
girosc_ang_x_prev = girosc_ang_x;
girosc_ang_y_prev = girosc_ang_y;
}
void setup()
{
Serial.begin(9600);
Wire.begin();
mpu.initialize();
Serial.println(mpu.testConnection() ? F("IMU iniciat correctament ") :F("Error al iniciar IMU"));
}
void loop()
{
// Llegir les velocitats angulars
mpu.getRotation(&gx, &gy, &gz);
updateGiro();
// Mostrar resultats
Serial.print(F("Rotacio en X: "));
Serial.print(girosc_ang_x);
Serial.print(F("Rotacio en Y: "));
Serial.println(girosc_ang_y);
delay(10);
}
Obtindre l’orientació amb filtre complementari
Aquest exemple emprem un filtre complementari per a combinar el senyal de l’acceleròmetre i giroscopi per a obtindre un millor mesurament de l’orientació del MPU-6050, com podem veure en l’entrada Medir la inclinación de un IMU con Arduino y filtro complementario.
/*
* Projecte nº: ARD034e
* Data: 03/02/2022
* Descripcio: Obtindre l'orientació amb filtre complementari
* Nota:
*
*/
//GND - GND
//VCC - VCC
//SDA - Pin A4
//SCL - Pin A5
#include "I2Cdev.h"
#include "MPU6050.h"
#include "Wire.h"
const int mpuAddress = 0x68; // Pot ser 0x68 o 0x69
MPU6050 mpu(mpuAddress);
int ax, ay, az;
int gx, gy, gz;
long tiempo_prev;
float dt;
float ang_x, ang_y;
float ang_x_prev, ang_y_prev;
void updateFiltered()
{
dt = (millis() - tiempo_prev) / 1000.0;
tiempo_prev = millis();
//Calcular els angles amb accelerometre
float accel_ang_x = atan(ay / sqrt(pow(ax, 2) + pow(az, 2)))*(180.0 / 3.14);
float accel_ang_y = atan(-ax / sqrt(pow(ay, 2) + pow(az, 2)))*(180.0 / 3.14);
//Calcular angle de rotacio amb giroscopi i filtre complementari
ang_x = 0.98*(ang_x_prev + (gx / 131)*dt) + 0.02*accel_ang_x;
ang_y = 0.98*(ang_y_prev + (gy / 131)*dt) + 0.02*accel_ang_y;
ang_x_prev = ang_x;
ang_y_prev = ang_y;
}
void setup()
{
Serial.begin(9600);
Wire.begin();
mpu.initialize();
Serial.println(mpu.testConnection() ? F("IMU iniciat correctament") :F("Error al iniciar IMU"));
}
void loop()
{
// Llegir les acceleracions i velocitats angulars
mpu.getAcceleration(&ax, &ay, &az);
mpu.getRotation(&gx, &gy, &gz);
updateFiltered();
Serial.print(F("Rotacio en X: "));
Serial.print(ang_x);
Serial.print(F(" Rotacio en Y: "));
Serial.println(ang_y);
delay(10);
}
Obtindre l’orientació mitjançant el DMP
En aquest últim exemple emprem el DMP integrat en el MPU-6050 per a realitzar la combinació del mesurament de l’acceleròmetre i el giroscopi, la qual cosa proporciona millor resultats que emprar un filtre complementari, i a més allibera a Arduino del procés de càlcul.
Perquè l’exemple funcione és necessari connectar el pin INT del MPU6050 a un pin amb interrupcions (en l’exemple, amb Arduino UNO o Nano, connectar al Pin 2).
/*
* Projecte nº: ARD034g
* Data: 03/02/2022
* Descripcio: Obtindre l'orientació mitjançant el DMP
* Nota:
*
*/
//GND - GND
//VCC - VCC
//SDA - Pin A4
//SCL - Pin A5
//INT - Pin 2
#include "I2Cdev.h"
#include "MPU6050_6Axis_MotionApps20.h"
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include "Wire.h"
#endif
// class default I2C address is 0x68
// specific I2C addresses may be passed as a parameter here
// AD0 low = 0x68
// AD0 high = 0x69
MPU6050 mpu;
//MPU6050 mpu(0x69); // <-- use for AD0 high
#define INTERRUPT_PIN 2
#define LED_PIN 13
bool blinkState = false;
// MPU control/status vars
bool dmpReady = false; // set true if DMP init was successful
uint8_t mpuIntStatus; // holds actual interrupt status byte from MPU
uint8_t devStatus; // return status after each device operation (0 = success, !0 = error)
uint16_t packetSize; // expected DMP packet size (default is 42 bytes)
uint16_t fifoCount; // count of all bytes currently in FIFO
uint8_t fifoBuffer[64]; // FIFO storage buffer
Quaternion q; // [w, x, y, z]
VectorInt16 aa; // [x, y, z]
VectorInt16 aaReal; // [x, y, z]
VectorInt16 aaWorld; // [x, y, z]
VectorFloat gravity; // [x, y, z]
float ypr[3]; // [yaw, pitch, roll]
volatile bool mpuInterrupt = false;
void dmpDataReady()
{
mpuInterrupt = true;
}
void setup()
{
// join I2C bus (I2Cdev library doesn't do this automatically)
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
Wire.setClock(400000); // 400kHz I2C clock. Comment this line if having compilation difficulties
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
Serial.begin(9600);
// Iniciar MPU6050
Serial.println(F("Initializing I2C devices..."));
mpu.initialize();
pinMode(INTERRUPT_PIN, INPUT);
// Comprobar conexion
Serial.println(F("Testing device connections..."));
Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
// Iniciar DMP
Serial.println(F("Initializing DMP..."));
devStatus = mpu.dmpInitialize();
// Valores de calibracion
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1688);
// Activar DMP
if (devStatus == 0)
{
Serial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
// Activar interrupcion
attachInterrupt(digitalPinToInterrupt(INTERRUPT_PIN), dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
Serial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
// get expected DMP packet size for later comparison
packetSize = mpu.dmpGetFIFOPacketSize();
}
else
{
// ERROR!
// 1 = initial memory load failed
// 2 = DMP configuration updates failed
// (if it's going to break, usually the code will be 1)
Serial.print(F("DMP Initialization failed (code "));
Serial.print(devStatus);
Serial.println(F(")"));
}
}
void loop()
{
// Si fallo al iniciar, parar programa
if (!dmpReady) return;
// Ejecutar mientras no hay interrupcion
while (!mpuInterrupt && fifoCount < packetSize)
{
// AQUI EL RESTO DEL CODIGO DE TU PROGRRAMA
}
mpuInterrupt = false;
mpuIntStatus = mpu.getIntStatus();
// Obtener datos del FIFO
fifoCount = mpu.getFIFOCount();
// Controlar overflow
if ((mpuIntStatus & 0x10) || fifoCount == 1024)
{
mpu.resetFIFO();
Serial.println(F("FIFO overflow!"));
}
else if (mpuIntStatus & 0x02)
{
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
// MMostrar Yaw, Pitch, Roll
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
Serial.print("ypr");
Serial.print(ypr[0] * 180/M_PI);
Serial.print("\t");
Serial.print(ypr[1] * 180/M_PI);
Serial.print("\t");
Serial.println(ypr[2] * 180/M_PI);
// Mostrar aceleracion
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetAccel(&aa, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetLinearAccel(&aaReal, &aa, &gravity);
Serial.print("areal\t");
Serial.print(aaReal.x);
Serial.print("\t");
Serial.print(aaReal.y);
Serial.print("\t");
Serial.println(aaReal.z);
}
}